
Как устроен сервопривод. Принцип работы

Третий компонент аппаратуры управления – сервомашинка. В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
Определение сервопривода
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Опишем более простым языком, как работает сервопривод:
- Сервопривод получает импульсный сигнал – управляющее значение, которое определяет угол поворота качалки сервы,
- Блок управления начинает сравнение поступившего параметра со значением на своем датчике,
- В зависимости от результата сравнения БУ возвращает сигнал, который предопределяет, какое действие необходимо выполнить: повернуть, ускориться или замедлиться, чтобы сравниваемые показатели стали одинаковыми.
Устройство сервопривода
Большинство современных рулевых машинок построены по одному принципу и состоят из таких составных частей: выходной вал, шестерни редуктора, двигатель постоянного тока, потенциометр, печатная плата и управляющая электроника.
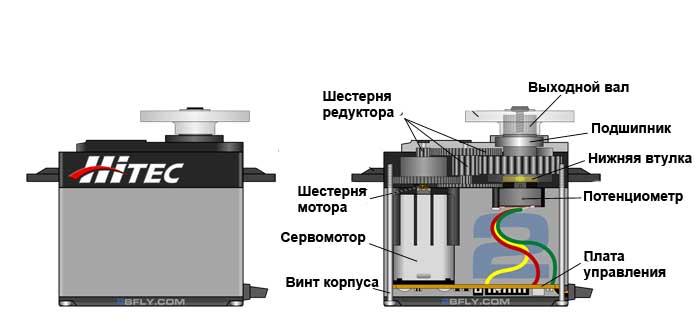
Редуктор вместе с мотором образуют привод. Чтобы трансформировать поступающее напряжение в механический поворот, нужен электродвигатель. Редуктор же – конструкция из шестеренок – преобразует крутящий момент и служит для понижения скорости вращения двигателя, так как часто она настолько большая, что совсем не годится для практического применения.
Вместе с включением и выключением электродвигателя вращается и выходной вал, к которому закрепляется качалка – ее, в свою очередь, крепят к рулю модели. Именно качалка будет задавать движение нашей модели, а для этого в устройстве сервопривода предусмотрен потенциометр – датчик, способный превратить угол поворота обратно в электросигнал.
Однако, одним из главных элементов является плата управления, которая представляет собой электронную схему. Именно она получает электрический импульс, анализирует полученный сигнал с данными потенциометра и включает/выключает электродвигатель. Вот как устроен сервопривод и работа его элементов.
Кстати, в качестве мотора в устройстве сервопривода могут использоваться коллекторные, коллекторные Coreless и бесколлекторные двигатели.
Управление сервоприводом. Принцип работы
Сервопривод получает импульсные сигналы, которые проходят по специальному проводу от приемника. Частота таких сигналов составляет 20мс, а их продолжительность может варьироваться в пределах 0,8-2,2мс. Чтобы у вас появилось четкое представление, как все-таки сигнал трансформируется в перемещение качалки, нужно проанализировать стандартную схему сервы.
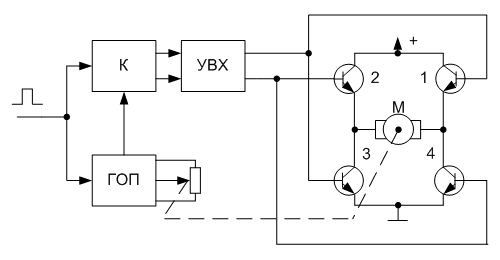
ГОП – генератор опонного импульса (к нему подсоединен потенциометр), К – компататор, УВХ – устройство выборки-хранения, М – электрический мотор, который охватывается диагональю силового моста.
Теперь разберём более подробно, как работает сервопривод. Итак, импульсный сигнал поступает от ресивера на компататор и в то же время активирует ГОП. Продолжительность опорного импульса связана с положением потенциометра, который соединен с выходным валом физически. Когда качалка находится в средней позиции, длина сигнала составляет 1,5мс, если же положение крайнее – 0,8 или 2,2 мс. Управляющий сигнал и опорный импульс анализируются компататором, который рассчитывает их разностную величину (расчет ведется по длительности импульсов). Именно длина разностного импульса и определяет насколько «ожидаемое» и «фактическое» состояние руля совпадает. Полученный показатель сохраняется в качестве потенциала в УВХ. Сложно?
Принцип работы сервопривода в разных условиях
![]() Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
![]() Пилот меняет положения стика, тем самым увеличивая управляющий импульс. На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
Пилот меняет положения стика, тем самым увеличивая управляющий импульс. На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
![]() Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
![]() Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т. е. качалка удерживается в одном положении.
Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т. е. качалка удерживается в одном положении.
Мы разобрали работу сервопривода в упрощенном варианте. На самом деле существует множество нюансов по настройке и использования девайса, зная которые можно избежать поломок и неприятных ситуаций.
Теперь, понимая, как устроен сервопривод, принцип его работы, можно отправляться и выбирать девайс для своей модели. Для этого вам нужно перейти в правильный раздел сайта «Planeta Hobby». Если же вы не знаете, как правильно подобрать серву для своего самолета или авто, обращайтесь за советом нашего консультанта или читайте эту полезную статью.

